ItemPick and BoxPick¶
Introduction¶
The ItemPick and BoxPick modules provide out-of-the-box perception solutions for robotic pick-and-place applications. ItemPick targets the detection of flat surfaces of unknown objects for picking with a suction gripper. BoxPick detects rectangular surfaces and determines their position, orientation and size for grasping. The interface of both modules is very similar. Therefore both modules are described together in this chapter.
In addition, both modules offer:
- A dedicated page on the rc_visard NG Web GUI for easy setup, configuration, testing, and application tuning.
- The definition of regions of interest to select relevant volumes in the scene (see RoiDB).
- A load carrier detection functionality for bin-picking applications (see LoadCarrier), to provide grasps for items inside a bin only.
- The definition of compartments inside a load carrier to provide grasps for specific volumes of the bin only.
- Support for static and robot-mounted cameras and optional integration with the Hand-eye calibration module, to provide grasps in the user-configured external reference frame.
- A quality value associated to each suggested grasp and related to the flatness of the grasping surface.
- Selection of a sorting strategy to sort the returned grasps.
- 3D visualization of the detection results with grasp points and gripper animations in the Web GUI.
Note
In this chapter, cluster and surface are used as synonyms and identify a set of points (or pixels) with defined geometrical properties.
The modules are optional on-board modules of the rc_visard NG and require separate ItemPick or BoxPick licenses to be purchased.
Detection of items (BoxPick)¶
The BoxPick module supports the detection of multiple item_models of
type RECTANGLE.
Each item model is defined by its minimum and maximum size, with the
minimum dimensions strictly smaller than the maximum dimensions.
The dimensions should be given fairly accurately to avoid misdetections,
while still considering a certain tolerance to account for possible production variations
and measurement inaccuracies.
The detection of boxes runs in several steps. First, the point cloud is segmented into preferably plane clusters. Then, straight line segments are detected in the 2D images and projected onto the corresponding clusters. The clusters and the detected lines are visualized in the “Surfaces” visualization on the Web GUI’s BoxPick page. Finally, for each cluster, the set of rectangles best fitting to the detected line segments is extracted.
Optionally, further information can be given to the BoxPick module:
- The ID of the load carrier which contains the items to be detected.
- A compartment inside the load carrier where to detect items.
- The ID of the region of interest where to search for the load carriers if a load carrier is set. Otherwise, the ID of the region of interest where to search for the items.
- The current robot pose in case the camera is mounted on the robot and
the chosen coordinate frame for the poses is
externalor the chosen region of interest is defined in the external frame.
The returned pose of a detected item is the pose of the center of the detected rectangle in the
desired reference frame (pose_frame), with its z axis pointing towards the camera.
Each detected item includes a uuid (Universally Unique Identifier) and the
timestamp of the oldest image that was used to detect it.
Computation of grasps¶
The ItemPick and BoxPick modules offer a service for computing grasps for suction grippers. The gripper is defined by its suction surface length and width.
The ItemPick module identifies flat surfaces in the scene and supports
flexible and/or deformable items. The type of these item_models is
called UNKNOWN since they don’t need to have a standard geometrical shape.
Optionally, the user can also specify the minimum and maximum size of the item.
For BoxPick, the grasps are computed on the detected rectangular items
(see Detection of items (BoxPick)).
Optionally, further information can be given to the modules in a grasp computation request:
- The ID of the load carrier which contains the items to be grasped.
- A compartment inside the load carrier where to compute grasps (see Load carrier compartments).
- The ID of the 3D region of interest where to search for the load carriers if a load carrier is set. Otherwise, the ID of the 3D region of interest where to compute grasps.
- Collision detection information: The ID of the gripper to enable collision checking and optionally a pre-grasp offset to define a pre-grasp position. Details on collision checking are given below in CollisionCheck.
A grasp provided by the ItemPick and BoxPick modules represents the recommended
pose of the TCP (Tool Center Point) of the suction gripper.
The grasp type is always set to SUCTION.
The computed grasp pose is the center of the biggest ellipse that can be inscribed in
each surface.
The grasp orientation is a right-handed coordinate system and is defined such
that its z axis is normal to the surface pointing inside the object at the grasp position and
its x axis is directed along the maximum elongation of the ellipse.
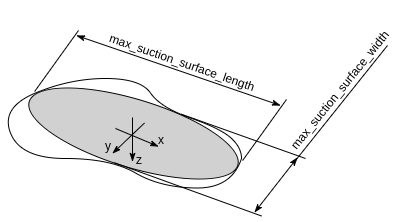
Fig. 26 Illustration of suction grasp with coordinate system and ellipse representing the maximum suction surface.
Each grasp includes the dimensions of the maximum suction surface available,
modelled as an ellipse of axes max_suction_surface_length and
max_suction_surface_width. The user is enabled to filter grasps by specifying
the minimum suction surface required by the suction device in use.
In the BoxPick module, the grasp position corresponds to the center of the detected rectangle and the dimensions of the maximum suction surface available matches the estimated rectangle dimensions. Detected rectangles with missing data or occlusions by other objects for more than 15% of their surface do not get an associated grasp.
Each grasp also includes a quality value, which gives an
indication of the flatness of the grasping surface.
The quality value varies between 0 and 1, where higher numbers correspond to a
flatter reconstructed surface.
The grasp definition is complemented by a uuid (Universally Unique Identifier)
and the timestamp of the oldest image that was used to compute the grasp.
Grasp sorting is performed based on the selected sorting strategy. The following sorting strategies
are available and can be set in the Web GUI
or using the set_sorting_strategies service call:
gravity: highest grasp points along the gravity direction are returned first,surface_area: grasp points with the largest surface area are returned first,direction: grasp points with the shortest distance along a defined directionvectorin a givenpose_frameare returned first.
If no sorting strategy is set or default sorting is chosen in the Web GUI, sorting is done based on a combination of
gravity and surface_area.
Interaction with other modules¶
Internally, the ItemPick and BoxPick modules depend on, and interact with other on-board modules as listed below.
Note
All changes and configuration updates to these modules will affect the performance of the ItemPick and BoxPick modules.
Stereo camera and Stereo matching¶
The ItemPick and BoxPick modules make internally use of the following data:
- Rectified images from the Camera module
(
rc_camera); - Disparity, error, and confidence images from the Stereo matching module
(
rc_stereomatching).
All processed images are guaranteed to be captured after the module trigger time.
IO and Projector Control¶
In case the rc_visard NG is used in conjunction with an external random dot projector and
the IO and Projector Control module (rc_iocontrol),
it is recommended to connect the projector to GPIO Out 1 and set
the stereo-camera module’s acquisition mode to SingleFrameOut1
(see Stereo matching parameters), so that
on each image acquisition trigger an image with and without projector pattern is acquired.
Alternatively, the output mode for the GPIO output in use should be set to ExposureAlternateActive
(see Description of run-time parameters).
In either case,
the Auto Exposure Mode exp_auto_mode should be set to AdaptiveOut1 to optimize the exposure
of both images (see Stereo camera parameters).
Hand-eye calibration¶
In case the camera has been calibrated to a robot, the ItemPick and BoxPick modules
can automatically provide poses in the robot coordinate frame.
For the ItemPick and BoxPick nodes’ Services, the frame of the
output poses can be controlled with the pose_frame argument.
Two different pose_frame values can be chosen:
- Camera frame (
camera). All poses provided by the modules are in the camera frame, and no prior knowledge about the pose of the camera in the environment is required. This means that the configured regions of interest and load carriers move with the camera. It is the user’s responsibility to update the configured poses if the camera frame moves (e.g. with a robot-mounted camera). - External frame (
external). All poses provided by the modules are in the external frame, configured by the user during the hand-eye calibration process. The module relies on the on-board Hand-eye calibration module to retrieve the sensor mounting (static or robot mounted) and the hand-eye transformation. If the mounting is static, no further information is needed. If the sensor is robot-mounted, therobot_poseis required to transform poses to and from theexternalframe.
Note
If no hand-eye calibration is available, all pose_frame values should be set to camera.
All pose_frame values that are not camera or external are rejected.
If the sensor is robot-mounted, the current robot_pose has to be provided depending on the value of pose_frame
and the definition of the sorting direction:
- If
pose_frameis set toexternal, providing the robot pose is obligatory. - If the sorting direction is defined in
external, providing the robot pose is obligatory. - In all other cases, providing the robot pose is optional.
LoadCarrier¶
The ItemPick and BoxPick modules use the load carrier detection functionality provided by the
LoadCarrier module (rc_load_carrier),
with the run-time parameters specified for this module. However, only one load carrier will be
returned and used in case multiple matching load carriers could be found in the scene. In case multiple
load carriers of the same type are visible, a 3D region of interest should be set to ensure that always the
same load carrier is used for the ItemPick and BoxPick modules.
CollisionCheck¶
Collision checking can be easily enabled for
grasp computation of the ItemPick and BoxPick modules by passing the ID of the used gripper and
optionally a pre-grasp offset to the
compute_grasps service call. The gripper has to be
defined in the GripperDB module
(see Setting a gripper)
and details about collision checking are given in Collision checking within other modules.
If collision checking is enabled, only grasps which are collision free will be returned. However, the visualization images on the ItemPick or BoxPick page of the Web GUI also show colliding grasp points as black ellipses.
The CollisionCheck module’s run-time parameters affect the collision detection as described in CollisionCheck Parameters.
Parameters¶
The ItemPick and BoxPick modules are called rc_itempick and rc_boxpick
in the REST-API and are represented in the Web GUI
under
and .
The user can explore and configure the rc_itempick and rc_boxpick
module’s run-time parameters, e.g. for development and testing, using the Web GUI or the
REST-API interface.
Parameter overview¶
These modules offer the following run-time parameters:
| Name | Type | Min | Max | Default | Description |
|---|---|---|---|---|---|
max_grasps |
int32 | 1 | 20 | 5 | Maximum number of provided grasps |
| Name | Type | Min | Max | Default | Description |
|---|---|---|---|---|---|
cluster_max_dimension |
float64 | 0.05 | 0.8 | 0.3 | Only for rc_itempick. Maximum allowed diameter for a cluster in meters. Clusters with a diameter larger than this value are not used for grasp computation. |
cluster_max_curvature |
float64 | 0.005 | 0.5 | 0.11 | Maximum curvature allowed within one cluster. The smaller this value, the more clusters will be split apart. |
clustering_patch_size |
int32 | 3 | 10 | 4 | Only for rc_itempick. Size in pixels of the square patches the depth map is subdivided into during the first clustering step |
clustering_max_surface_rmse |
float64 | 0.0005 | 0.01 | 0.004 | Maximum root-mean-square error (RMSE) in meters of points belonging to a surface |
clustering_discontinuity_factor |
float64 | 0.1 | 5.0 | 1.0 | Factor used to discriminate depth discontinuities within a patch. The smaller this value, the more clusters will be split apart. |
| Name | Type | Min | Max | Default | Description |
|---|---|---|---|---|---|
mode |
string | - | - | Unconstrained | Mode of the rectangle detection: [Unconstrained, PackedGridLayout] |
manual_line_sensitivity |
bool | false | true | false | Indicates whether the user-defined line sensitivity should be used or the automatic one |
line_sensitivity |
float64 | 0.1 | 1.0 | 0.1 | Sensitivity of the line detector |
prefer_splits |
bool | false | true | false | Indicates whether rectangles are split into smaller ones when possible |
Description of run-time parameters¶
Each run-time parameter is represented by a row on the Web GUI’s ItemPick or BoxPick page. The name in the Web GUI is given in brackets behind the parameter name and the parameters are listed in the order they appear in the Web GUI:
max_grasps (Maximum Grasps)¶
sets the maximum number of provided grasps.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/<rc_itempick|rc_boxpick>/parameters/parameters?max_grasps=<value>PUT http://<host>/api/v1/nodes/<rc_itempick|rc_boxpick>/parameters?max_grasps=<value>
cluster_max_dimension (Only for ItemPick, Cluster Maximum Dimension)¶
is the maximum allowed diameter for a cluster in meters. Clusters with a diameter larger than this value are not used for grasp computation.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_itempick/parameters/parameters?cluster_max_dimension=<value>PUT http://<host>/api/v1/nodes/rc_itempick/parameters?cluster_max_dimension=<value>
cluster_max_curvature (Cluster Maximum Curvature)¶
is the maximum curvature allowed within one cluster. The smaller this value, the more clusters will be split apart.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/<rc_itempick|rc_boxpick>/parameters/parameters?cluster_max_curvature=<value>PUT http://<host>/api/v1/nodes/<rc_itempick|rc_boxpick>/parameters?cluster_max_curvature=<value>
clustering_patch_size (Only for ItemPick, Patch Size)¶
is the size of the square patches the depth map is subdivided into during the first clustering step in pixels.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_itempick/parameters/parameters?clustering_patch_size=<value>PUT http://<host>/api/v1/nodes/rc_itempick/parameters?clustering_patch_size=<value>
clustering_discontinuity_factor (Discontinuity Factor)¶
is the factor used to discriminate depth discontinuities within a patch. The smaller this value, the more clusters will be split apart.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/<rc_itempick|rc_boxpick>/parameters/parameters?clustering_discontinuity_factor=<value>PUT http://<host>/api/v1/nodes/<rc_itempick|rc_boxpick>/parameters?clustering_discontinuity_factor=<value>
clustering_max_surface_rmse (Maximum Surface RMSE)¶
is the maximum root-mean-square error (RMSE) in meters of points belonging to a surface.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/<rc_itempick|rc_boxpick>/parameters/parameters?clustering_max_surface_rmse=<value>PUT http://<host>/api/v1/nodes/<rc_itempick|rc_boxpick>/parameters?clustering_max_surface_rmse=<value>
mode (Only for BoxPick, Mode)¶
determines the mode of the rectangle detection. Possible values are
UnconstrainedandPackedGridLayout. InPackedGridLayoutmode, rectangles of a cluster are detected in a dense grid pattern. This mode is appropriate for many palletizing/de-palletizing scenarios. InUnconstrainedmode (default), rectangles are detected without posing any constraints on their relative locations. Fig. 27 illustrates the scenarios for the different modes.
Fig. 27 Illustration of appropriate scenarios for the available BoxPick modes
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_boxpick/parameters/parameters?mode=<value>PUT http://<host>/api/v1/nodes/rc_boxpick/parameters?mode=<value>
manual_line_sensitivity (Only for BoxPick, Manual Line Sensitivity)¶
determines whether the user-defined line sensitivity should be used to extract the lines for rectangle detection. If this parameter is set to true, the user-defined
line_sensitivityvalue will be used. If this parameter is set to false, automatic line sensitivity will be used. This parameter should be set to true when automatic line sensitivity does not give enough lines at the box boundaries so that boxes cannot be detected. The detected line segments are visualized in the “Surfaces” visualization on the Web GUI’s BoxPick page.Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_boxpick/parameters/parameters?manual_line_sensitivity=<value>PUT http://<host>/api/v1/nodes/rc_boxpick/parameters?manual_line_sensitivity=<value>
line_sensitivity (Only for BoxPick, Line Sensitivity)¶
determines the line sensitivity for extracting the lines for rectangle detection, if the parameter
manual_line_sensitivityis set to true. Otherwise, the value of this parameter has no effect on the rectangle detection. Higher values give more line segments, but also increase the runtime of the box detection. This parameter should be increased when boxes cannot be detected because their boundary edges are not detected. The detected line segments are visualized in the “Surfaces” visualization on the Web GUI’s BoxPick page.Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_boxpick/parameters/parameters?line_sensitivity=<value>PUT http://<host>/api/v1/nodes/rc_boxpick/parameters?line_sensitivity=<value>
prefer_splits (Only for BoxPick, Prefer Splits)¶
determines whether rectangles should be split into smaller ones if the smaller ones also match the given item models. This parameter should be set to true for packed box layouts in which the given item models would also match a rectangle of the size of two adjoining boxes. If this parameter is set to false, the larger rectangles will be preferred in these cases.
Via the REST-API, this parameter can be set as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_boxpick/parameters/parameters?prefer_splits=<value>PUT http://<host>/api/v1/nodes/rc_boxpick/parameters?prefer_splits=<value>
Status values¶
The rc_itempick and rc_boxpick modules report the following status values:
| Name | Description |
|---|---|
data_acquisition_time |
Time in seconds required by the last active service to acquire images |
grasp_computation_time |
Processing time of the last grasp computation in seconds |
last_timestamp_processed |
The timestamp of the last processed dataset |
load_carrier_detection_time |
Processing time of the last load carrier detection in seconds |
processing_time |
Processing time of the last detection (including load carrier detection) in seconds |
state |
The current state of the rc_itempick and rc_boxpick node |
The reported state can take one of the following values.
| State name | Description |
|---|---|
| IDLE | The module is idle. |
| RUNNING | The module is running and ready for load carrier detection and grasp computation. |
| FATAL | A fatal error has occurred. |
Services¶
The user can explore and call the rc_itempick and rc_boxpick module’s services,
e.g. for development and testing, using the
REST-API interface or
the rc_visard NG
Web GUI.
The ItemPick and BoxPick modules offer the following services.
detect_items (BoxPick only)¶
Triggers the detection of rectangles as described in Detection of items (BoxPick).
Details
This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_boxpick/services/detect_itemsPUT http://<host>/api/v1/nodes/rc_boxpick/services/detect_itemsRequired arguments:
pose_frame: see Hand-eye calibration.
item_models: list of rectangles with minimum and maximum size, with the minimum dimensions strictly smaller than the maximum dimensions. The type of each item model must beRECTANGLE. The dimensions should be given fairly accurately to avoid misdetections, while still considering a certain tolerance to account for possible production variations and measurement inaccuracies.Potentially required arguments:
robot_pose: see Hand-eye calibration.Optional arguments:
load_carrier_id: ID of the load carrier which contains the items to be detected.
load_carrier_compartment: compartment inside the load carrier where to detect items (see Load carrier compartments).
region_of_interest_id: ifload_carrier_idis set, ID of the 3D region of interest where to search for the load carriers. Otherwise, ID of the 3D region of interest where to search for the items.The definition for the request arguments with corresponding datatypes is:
{ "args": { "item_models": [ { "rectangle": { "max_dimensions": { "x": "float64", "y": "float64" }, "min_dimensions": { "x": "float64", "y": "float64" } }, "type": "string" } ], "load_carrier_compartment": { "box": { "x": "float64", "y": "float64", "z": "float64" }, "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } } }, "load_carrier_id": "string", "pose_frame": "string", "region_of_interest_id": "string", "robot_pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } } } }
load_carriers: list of detected load carriers.
items: list of detected rectangles.
timestamp: timestamp of the image set the detection ran on.
return_code: holds possible warnings or error codes and messages.The definition for the response with corresponding datatypes is:
{ "name": "detect_items", "response": { "items": [ { "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "rectangle": { "x": "float64", "y": "float64" }, "timestamp": { "nsec": "int32", "sec": "int32" }, "type": "string", "uuid": "string" } ], "load_carriers": [ { "height_open_side": "float64", "id": "string", "inner_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "outer_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "overfilled": "bool", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "rim_ledge": { "x": "float64", "y": "float64" }, "rim_step_height": "float64", "rim_thickness": { "x": "float64", "y": "float64" }, "type": "string" } ], "return_code": { "message": "string", "value": "int16" }, "timestamp": { "nsec": "int32", "sec": "int32" } } }
compute_grasps (for ItemPick)¶
Triggers the computation of grasping poses for a suction device as described in Computation of grasps.
Details
This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_itempick/services/compute_graspsPUT http://<host>/api/v1/nodes/rc_itempick/services/compute_graspsRequired arguments:
pose_frame: see Hand-eye calibration.
suction_surface_length: length of the suction device grasping surface.
suction_surface_width: width of the suction device grasping surface.Potentially required arguments:
robot_pose: see Hand-eye calibration.Optional arguments:
load_carrier_id: ID of the load carrier which contains the items to be grasped.
load_carrier_compartment: compartment inside the load carrier where to compute grasps (see Load carrier compartments).
region_of_interest_id: ifload_carrier_idis set, ID of the 3D region of interest where to search for the load carriers. Otherwise, ID of the 3D region of interest where to compute grasps.
item_models: list of unknown items with minimum and maximum dimensions, with the minimum dimensions strictly smaller than the maximum dimensions. Only oneitem_modelof typeUNKNOWNis currently supported.
collision_detection: see Collision checking within other modules.The definition for the request arguments with corresponding datatypes is:
{ "args": { "collision_detection": { "gripper_id": "string", "pre_grasp_offset": { "x": "float64", "y": "float64", "z": "float64" } }, "item_models": [ { "type": "string", "unknown": { "max_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "min_dimensions": { "x": "float64", "y": "float64", "z": "float64" } } } ], "load_carrier_compartment": { "box": { "x": "float64", "y": "float64", "z": "float64" }, "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } } }, "load_carrier_id": "string", "pose_frame": "string", "region_of_interest_id": "string", "robot_pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "suction_surface_length": "float64", "suction_surface_width": "float64" } }
load_carriers: list of detected load carriers.
grasps: sorted list of suction grasps.
timestamp: timestamp of the image set the detection ran on.
return_code: holds possible warnings or error codes and messages.The definition for the response with corresponding datatypes is:
{ "name": "compute_grasps", "response": { "grasps": [ { "item_uuid": "string", "max_suction_surface_length": "float64", "max_suction_surface_width": "float64", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "quality": "float64", "timestamp": { "nsec": "int32", "sec": "int32" }, "type": "string", "uuid": "string" } ], "load_carriers": [ { "height_open_side": "float64", "id": "string", "inner_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "outer_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "overfilled": "bool", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "rim_ledge": { "x": "float64", "y": "float64" }, "rim_step_height": "float64", "rim_thickness": { "x": "float64", "y": "float64" }, "type": "string" } ], "return_code": { "message": "string", "value": "int16" }, "timestamp": { "nsec": "int32", "sec": "int32" } } }
compute_grasps (for BoxPick)¶
Triggers the detection of rectangles and the computation of grasping poses for the detected rectangles as described in Computation of grasps.
Details
This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_boxpick/services/compute_graspsPUT http://<host>/api/v1/nodes/rc_boxpick/services/compute_graspsRequired arguments:
pose_frame: see Hand-eye calibration.
item_models: list of rectangles with minimum and maximum size, with the minimum dimensions strictly smaller than the maximum dimensions. The type of each item model must beRECTANGLE. The dimensions should be given fairly accurately to avoid misdetections, while still considering a certain tolerance to account for possible production variations and measurement inaccuracies.
suction_surface_length: length of the suction device grasping surface.
suction_surface_width: width of the suction device grasping surface.Potentially required arguments:
robot_pose: see Hand-eye calibration.Optional arguments:
load_carrier_id: ID of the load carrier which contains the items to be grasped.
load_carrier_compartment: compartment inside the load carrier where to compute grasps (see Load carrier compartments).
region_of_interest_id: ifload_carrier_idis set, ID of the 3D region of interest where to search for the load carriers. Otherwise, ID of the 3D region of interest where to compute grasps.
collision_detection: see Collision checking within other modules.The definition for the request arguments with corresponding datatypes is:
{ "args": { "collision_detection": { "gripper_id": "string", "pre_grasp_offset": { "x": "float64", "y": "float64", "z": "float64" } }, "item_models": [ { "rectangle": { "max_dimensions": { "x": "float64", "y": "float64" }, "min_dimensions": { "x": "float64", "y": "float64" } }, "type": "string" } ], "load_carrier_compartment": { "box": { "x": "float64", "y": "float64", "z": "float64" }, "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } } }, "load_carrier_id": "string", "pose_frame": "string", "region_of_interest_id": "string", "robot_pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "suction_surface_length": "float64", "suction_surface_width": "float64" } }
load_carriers: list of detected load carriers.
items: list of detected rectangles.
grasps: sorted list of suction grasps.
timestamp: timestamp of the image set the detection ran on.
return_code: holds possible warnings or error codes and messages.The definition for the response with corresponding datatypes is:
{ "name": "compute_grasps", "response": { "grasps": [ { "item_uuid": "string", "max_suction_surface_length": "float64", "max_suction_surface_width": "float64", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "quality": "float64", "timestamp": { "nsec": "int32", "sec": "int32" }, "type": "string", "uuid": "string" } ], "items": [ { "grasp_uuids": [ "string" ], "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "rectangle": { "x": "float64", "y": "float64" }, "timestamp": { "nsec": "int32", "sec": "int32" }, "type": "string", "uuid": "string" } ], "load_carriers": [ { "height_open_side": "float64", "id": "string", "inner_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "outer_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "overfilled": "bool", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "rim_ledge": { "x": "float64", "y": "float64" }, "rim_step_height": "float64", "rim_thickness": { "x": "float64", "y": "float64" }, "type": "string" } ], "return_code": { "message": "string", "value": "int16" }, "timestamp": { "nsec": "int32", "sec": "int32" } } }
set_sorting_strategies¶
Persistently stores the sorting strategy for sorting the grasps returned by the
compute_graspsservice (see Computation of grasps).Details
This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/<rc_itempick|rc_boxpick>/services/set_sorting_strategiesPUT http://<host>/api/v1/nodes/<rc_itempick|rc_boxpick>/services/set_sorting_strategiesOnly one strategy may have a
weightgreater than 0. If allweightvalues are set to 0, the module will use the default sorting strategy.If the weight for
directionis set, thevectormust contain the direction vector andpose_framemust be eithercameraorexternal.The definition for the request arguments with corresponding datatypes is:
{ "args": { "direction": { "pose_frame": "string", "vector": { "x": "float64", "y": "float64", "z": "float64" }, "weight": "float64" }, "gravity": { "weight": "float64" }, "surface_area": { "weight": "float64" } } }The definition for the response with corresponding datatypes is:
{ "name": "set_sorting_strategies", "response": { "return_code": { "message": "string", "value": "int16" } } }
get_sorting_strategies¶
Returns the sorting strategy for sorting the grasps returned by the
compute-graspsservice (see Computation of grasps).Details
This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/<rc_itempick|rc_boxpick>/services/get_sorting_strategiesPUT http://<host>/api/v1/nodes/<rc_itempick|rc_boxpick>/services/get_sorting_strategiesThis service has no arguments.All
weightvalues are 0 when the module uses the default sorting strategy.The definition for the response with corresponding datatypes is:
{ "name": "get_sorting_strategies", "response": { "direction": { "pose_frame": "string", "vector": { "x": "float64", "y": "float64", "z": "float64" }, "weight": "float64" }, "gravity": { "weight": "float64" }, "return_code": { "message": "string", "value": "int16" }, "surface_area": { "weight": "float64" } } }
start¶
Starts the module. If the command is accepted, the module moves to state
RUNNING.Details
This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/<rc_itempick|rc_boxpick>/services/startPUT http://<host>/api/v1/nodes/<rc_itempick|rc_boxpick>/services/startThis service has no arguments.The
current_statevalue in the service response may differ fromRUNNINGif the state transition is still in process when the service returns.The definition for the response with corresponding datatypes is:
{ "name": "start", "response": { "accepted": "bool", "current_state": "string" } }
stop¶
Stops the module. If the command is accepted, the module moves to state
IDLE.Details
This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/<rc_itempick|rc_boxpick>/services/stopPUT http://<host>/api/v1/nodes/<rc_itempick|rc_boxpick>/services/stopThis service has no arguments.The
current_statevalue in the service response may differ fromIDLEif the state transition is still in process when the service returns.The definition for the response with corresponding datatypes is:
{ "name": "stop", "response": { "accepted": "bool", "current_state": "string" } }
reset_defaults¶
Resets all parameters of the module to its default values, as listed in above table. The reset does not apply to sorting strategies.
Details
This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/<rc_itempick|rc_boxpick>/services/reset_defaultsPUT http://<host>/api/v1/nodes/<rc_itempick|rc_boxpick>/services/reset_defaultsThis service has no arguments.The definition for the response with corresponding datatypes is:
{ "name": "reset_defaults", "response": { "return_code": { "message": "string", "value": "int16" } } }
set_region_of_interest (deprecated)¶
Persistently stores a 3D region of interest on the rc_visard NG.
Details
This service can be called as follows.
This service is not available in API version 2. Use set_region_of_interest inrc_roi_dbinstead.PUT http://<host>/api/v1/nodes/<rc_itempick|rc_boxpick>/services/set_region_of_interest
get_regions_of_interest (deprecated)¶
Returns the configured 3D regions of interest with the requested
region_of_interest_ids.Details
This service can be called as follows.
This service is not available in API version 2. Use get_regions_of_interest inrc_roi_dbinstead.PUT http://<host>/api/v1/nodes/<rc_itempick|rc_boxpick>/services/get_regions_of_interest
delete_regions_of_interest (deprecated)¶
Deletes the configured 3D regions of interest with the requested
region_of_interest_ids.Details
This service can be called as follows.
This service is not available in API version 2. Use delete_regions_of_interest inrc_roi_dbinstead.PUT http://<host>/api/v1/nodes/<rc_itempick|rc_boxpick>/services/delete_regions_of_interest
Return codes¶
Each service response contains a return_code,
which consists of a value plus an optional message.
A successful service returns with a return_code value of 0.
Negative return_code values indicate that the service failed.
Positive return_code values indicate that the service succeeded with additional information.
The smaller value is selected in case a service has multiple return_code values,
but all messages are appended in the return_code message.
The following table contains a list of common codes:
| Code | Description |
|---|---|
| 0 | Success |
| -1 | An invalid argument was provided |
| -3 | An internal timeout occurred, e.g. during box detection if the given dimension range is too large |
| -4 | Data acquisition took longer than allowed |
| -10 | New element could not be added as the maximum storage capacity of load carriers or regions of interest has been exceeded |
| -11 | Sensor not connected, not supported or not ready |
| -200 | Fatal internal error |
| -301 | More than one item model of type UNKNOWN provided to the compute_grasps service |
| 10 | The maximum storage capacity of load carriers or regions of interest has been reached |
| 11 | An existent persistent model was overwritten by the call to set_load_carrier or set_region_of_interest |
| 100 | The requested load carriers were not detected in the scene |
| 101 | No valid surfaces or grasps were found in the scene |
| 102 | The detected load carrier is empty |
| 103 | All computed grasps are in collision with the load carrier |
| 300 | A valid robot_pose was provided as argument but it is not required |
| 999 | Additional hints for application development |